

We Are
THE DESIGNERS OF
THE CLAW

"THE CLAW" is ontstaan tijdens het projectvak Technische Systemen gegeven aan de TU Delft.

We kregen de opdracht een grijper te produceren die aan verschillende eisen moest voldoen. Met als grootste eis natuurlijk dat de grijper objecten vast moest pakken.

Tijdens het project hebben we niet alleen geleerd hoe we een grijper maken, maar vooral hoe je als team samenwerkt en hoe je samen tot een goed eindproduct komt.
HET TEAM
Nogmaals welkom op de website van WB81. WB81 is een projectgroep bestaande uit 7 mannen die aan de TU Delft studeren. In het eerste kwartaal van onze studie moesten wij voor het vak technische systemen een grijper ontwerpen en fabriceren. Deze grijper zullen wij via deze site gaan presenteren.
Al geïnteresseerd? Neem dan gerust een kijkje op onze website!

Mees Vanderbroeck
THE MATLAB MAGICIAN

Raf van de Kar
MISTER SMOOTHTALK

Yoran Stuit
THE ACTUATOR

Daan Smits
THE DREAMER

Ramon Stoker
THE SOLIDWORKS SUPERHERO

Dylan Smit
THE CRANEMACHINIST

Jesse Plomp
THE GLUEBOY
HET PROCES
Tijdens het eerste kwartaal van onze studie werktuigbouwkunde kregen we de opdracht om een grijper te ontwerpen en vervolgens te fabriceren. Hier volgt een korte samenvatting van de opdracht:
Ontwerp een mechanische grijper die ronde bekers of flesjes (maximale inhoud 0,5 l) en tetrapakken met vierkante doorsnede (maximale inhoud 0,5 l) met en zonder inhoud kan oppakken en op een circa 150 mm hoger en naast gelegen plateau kan neerzetten. De grijper moet worden aangedreven door pneumatische cilinder-actuatoren.



LIJST VAN EISEN
Voordat we begonnen aan het ontwerpen van onze grijpers, werd aan ons gevraagd om een lijst van eisen op te stellen. Het ontwerp moet uiteraard aan deze eisen voldoen. Doet hij dat niet, dan is het ontwerp niet goed genoeg en komt hij niet in aanmerking om gefabriceerd te worden.
- De grijper moet zowel een bekertje als een pakje (van 0.5 liter) gevuld met vloeistof vast kunnen pakken.
- De grijper moet vervolgens een verticale beweging kunnen maken van 150 millimeter.
- De grijper moet vervolgens een horizontale beweging maken van 100 millimeter
- De grijper moet het bekertje zo stabiel houden dat de vloeistof niet uit het bekertje valt.
- De grijper moet binnen 250 millimeter breedte op het bord kunnen worden bevestigd of op zichzelf los kunnen staan
- De grijper moet worden aangedreven met 2 kleine en 1 grote actuator.
- De actuatoren moeten binnen 5 minuten bevestigd worden
- De onderdelen van PMMA mogen bij elkaar geen grotere omtrek hebben dan 9000 millimeter.
- De onderdelen van PMMA mogen een maximaal oppervlakte hebben van 490x240 millimeter.
- De grijper moet veilig zijn in gebruik
- De grijper moet veilig gefabriceerd worden.
- De grijper moet realiseerbaar zijn.
Naast de lijst van eisen moet er ook een lijst met wensen gemaakt worden. De grijper hoeft niet per se aan de lijst met wensen te voldoen, maar een ontwerp die aan zoveel mogelijk wensen voldoet krijgt wel bonuspunten.
- De grijper moet zo min mogelijk kosten.
- De grijper moet zo mooi mogelijk zijn.
- De grijper moet zo makkelijk mogelijk in gebruik zijn.
- De grijper moet zo vloeiend mogelijk bewegen.
- De grijper moet zo origineel mogelijk zijn.
- De grijper moet zo veel mogelijk uit PMMA bestaan.
CONCEPTEN
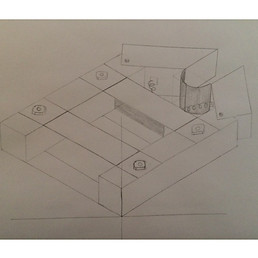
Na het opstellen van de lijst van eisen zijn we snel gaan lopen over de lange weg naar de perfecte grijper. Als eerste stap hebben we allemaal een eigen grijper bedacht die we vervolgens door middel van een isometrische tekening en een kleine uitleg/presentatie aan elkaar hebben gepresenteerd. Wat we hieraan hebben gehad vraag je je nu af? Een goed gesprek met opbouwende kritiek over elkaars grijpers, inzicht in de perspectieven en ideeën van onze groep, maar wat misschien wel het belangrijkste was, was dat we hiermee de eerste stappen zetten naar THE CLAW.
Ontwerp Dylan Smit
Voordelen:
- Lichte grijper.
- Kan voor groot deel uit PMMA gemaakt worden.
Nadelen:
- Kans op instabiliteit in de werking.
- 2 actuatoren nodig voor de grijper.

Ontwerp Yoran Stuit
- Weinig materiaal nodig.
- Kan bekertje van zowel de zijkant als de bovenkant pakken.
Nadelen:
- Lastig monteren op bewegingssysteem.
- Geen 100% zekerheid goede werking.

Ontwerp Mees Vanderbroeck
Voordelen:
- Makkelijk aan bewegingssysteem te monteren.
- Grote wauw-factor.
Nadelen:
- Tandwielen kunnen instabiel uitvallen.
- Veel materiaal nodig (zwaar).

Ontwerp Raf van de Kar
Voordelen:
- Weinig materiaal (licht).
- Door eenvoud weinig onverwachte complicaties.
Nadelen:
- Geen grote wauw-factor.
- Aangezien de zware actuator bovenaan zit is deze grijper erg instabiel.

Ontwerp Daan Smits
Voordelen:
- Voorwerp beweegt automatisch naar voren.
Nadelen:
- Beker beweegt tijdens grijpen met grote snelheid naar voren, waardoor het water eruit zou kunnen vallen

Ontwerp Ramon Stoker
Voordelen:
- Grijper is gemakkelijk te monteren op bewegingssteem
- Grijper kan volledig uit PMMA gemaakt worden
Nadelen:
- Grijper kan alleen vierkante voorwerpen oppakken
Beoordelingen
Toen iedereen klaar was met het bedenken, tekenen en presenteren van zijn idee leek het ons een goed plan om cijfers te geven aan de ontworpen grijpers. Elke grijper heeft voor een aantal eisen een cijfer gekregen op een schaal van 1 tot 10. Zo konden we gemakkelijk zien welke grijper overall het beste was en welke grijper het beste aan een eis voldeed. Dit was uiteindelijk een grote factor in het bepalen van de keuze van het ontwerp.
MORFOLOGISCH SCHEMA
In het morfologisch schema staan verschillende functies van de grijper die deze moet beheersen. Voor elke functie zijn er natuurlijk verschillende oplossingen. Deze oplossingen staan ook in het morfologische schema. Het maken van een morfologisch schema is erg belangrijk voor het ontwerpen van een product. Zo kun je via het schema gemakkelijk een combinatie van oplossingen voor verschillende problemen kiezen en ook gelijk kijken of deze oplossingen elkaar niet tegen zullen werken of juist voor alleen maar meer verbetering zorgen.


KRACHTENANALYSE
Voordat we onze grijper gingen produceren moest er natuurlijk eerst een beetje wiskunde- en natuurkundemagie worden toegepast op ons ontwerp. Dus zoals de Amerikan altijd zo lekker zeggen: Let's do the Math!




HET RESULTAAT
Al met al zijn wij als projectgroep stiekem toch wel een beetje trots op ons eindproduct. We hebben tijdens het ontwerpen en fabriceren gefilmd. Hier hebben we een kort filmpje van gemaakt.
De EVALUATIE
Over het algemeen zijn we tevreden met hoe ons project is gegaan. De communicatie was goed binnen de groep. Er zijn goede afspraken gemaakt bij elke deadline. Tijdens de projectvergaderingen en via Whatsapp hebben we veel met elkaar gebrainstormd en gepraat over onze grijper. Deze goede communicatie kwam o.a. tot stand door de goede sfeer in de groep. Iedereen kon het goed vinden met elkaar. Hierdoor zette iedereen zich goed in. De taakverdeling hielp daar ook bij. We hebben over het algemeen de juiste mensen de juiste dingen laten doen. Hierdoor liep het ontwikkelen van de grijper soepel.
Jammer genoeg ontstond er in de laatste fase (de fabricage van de grijper) een probleem. We hebben, helaas, door een verkeerde inschatting niet de grijper met de actuatoren kunnen testen. Dit kwam doordat we het bevestigingspunt voor de actuatoren verkeerd geplaatst hadden. Er ontstond daardoor een tijdgebrek. Het is ons dus niet meer gelukt om die laatste fase goed af te ronden. Gelukkig hebben we onze solidworks superhero (Ramon) in onze groep zitten. Ramon heeft met solidworks de grijper getekent en een filmpje gemaakt van de werking van onze grijper. Zo kan iedereen toch duidelijk de werking van onze grijper zien. Het filmpje is te zien in onze film.
Als we terugkijken op de fabricage van de grijper kunnen we wel zeggen dat we trots zijn op ons ontwerp. We hebben aan een groot deel van onze eisen voldaan, en zelfs de wensen zijn niet vergeten in het ontwerp. Hier een klein overzicht:
VOLTOOIDE EISEN & WENSEN
- De grijper moet zowel een bekertje als een pakje (van 0.5 liter) gevuld met vloeistof vast kunnen pakken.
- De grijper moet vervolgens een verticale beweging kunnen maken van 150 millimeter.
- De grijper moet vervolgens een horizontale beweging maken van 100 millimeter
- De grijper moet binnen 250 millimeter breedte op het bord kunnen worden bevestigd of op zichzelf los kunnen staan
- De grijper moet worden aangedreven met 2 kleine en 1 grote actuator.
- De onderdelen van PMMA mogen bij elkaar geen grotere omtrek hebben dan 9000 millimeter.
- De onderdelen van PMMA mogen een maximaal oppervlakte hebben van 490x240 millimeter.
- De grijper moet veilig zijn in gebruik
- De grijper moet veilig gefabriceerd worden.
- De grijper moet realiseerbaar zijn.
- De grijper moet zo mooi mogelijk zijn.
- De grijper moet zo makkelijk mogelijk in gebruik zijn.
- De grijper moet zo vloeiend mogelijk bewegen.
- De grijper moet zo origineel mogelijk zijn.
NIET VOLTOOIDE EISEN & WENSEN (+REDEN)
- De grijper moet het bekertje zo stabiel houden dat de vloeistof niet uit het bekertje valt.
(We hebben de grijper niet met actuatoren kunnen testen dus we weten niet hoe stabiel het bekertje zou zijn gebleven)
- De grijper moet zo min mogelijk kosten.
(Zo min mogelijk staat gelijk aan 0 euro en dus zou de grijper volledig uit PMMA gemaakt moeten worden. dit is niet gelukt)
- De actuatoren moeten binnen 5 minuten bevestigd worden
(Dit is ons tijdens de sessies in AWS niet gelukt)
- De grijper moet zo veel mogelijk uit PMMA bestaan.
(We hebben niet de volledige PMMA plaat gebruikt)
Verder heeft iedereen een persoonlijk verbeterpunt bedacht:
Raf: Vaker op tijd komen voor de project vergaderingen.
Ramon: Meer initiatief nemen.
Mees: Duidelijker de afspraken notuleren.
Jesse: Beter plannen van werk en project.
Dylan: De projectvergaderingen beter voorbereiden.
Yoran: Meer tijd nemen voor de taken die mij toegewezen worden.
Daan: Betere concentratie bij projectvergaderingen.
Als cijfer voor onze groepssamenwerking geven wij onszelf een 8,1.
En wij vinden ons eindproduct, de website en de uiteindelijke grijper, een 7,9 waard.
Een voor ons zeer geslaagd project dus!